Zero Harm
Robots take the hazardous window — toxic gas, instability, the unknown — so no person has to. Safety stops being a trade-off against schedule.
Lunarian builds the autonomy and intelligence that lets robots work where people can't — delivering zero-harm safety and uninterrupted productivity in the world's most hazardous terrain, from the post-blast mine heading to the lunar subsurface.
Enabling safe, effective extraction and exploration — on, and off, Earth.
People should never have to enter the most dangerous places to keep them productive. Lunarian develops the autonomy that sends robots in instead — while operators stay in the control room: zero harm to personnel, no loss of production, in terrain that no human should have to set foot in.
Robots take the hazardous window — toxic gas, instability, the unknown — so no person has to. Safety stops being a trade-off against schedule.
Autonomous re-entry and inspection recover the hours lost to manual clearance. The operation keeps moving while conditions are still being verified.
One autonomy stack, many environments — from active blast zones and deep mine headings to lunar lava tubes. Hardware adapts; the intelligence carries over.

We're not building a universal robot brain. Our autonomy is engineered around the mine process itself — onboard decision-making and compute tuned to the specific tasks that matter underground, predictable and self-directed rather than over-built to think like a human. That same domain specificity is what carries the stack to lunar exploration and lava-tube mapping.
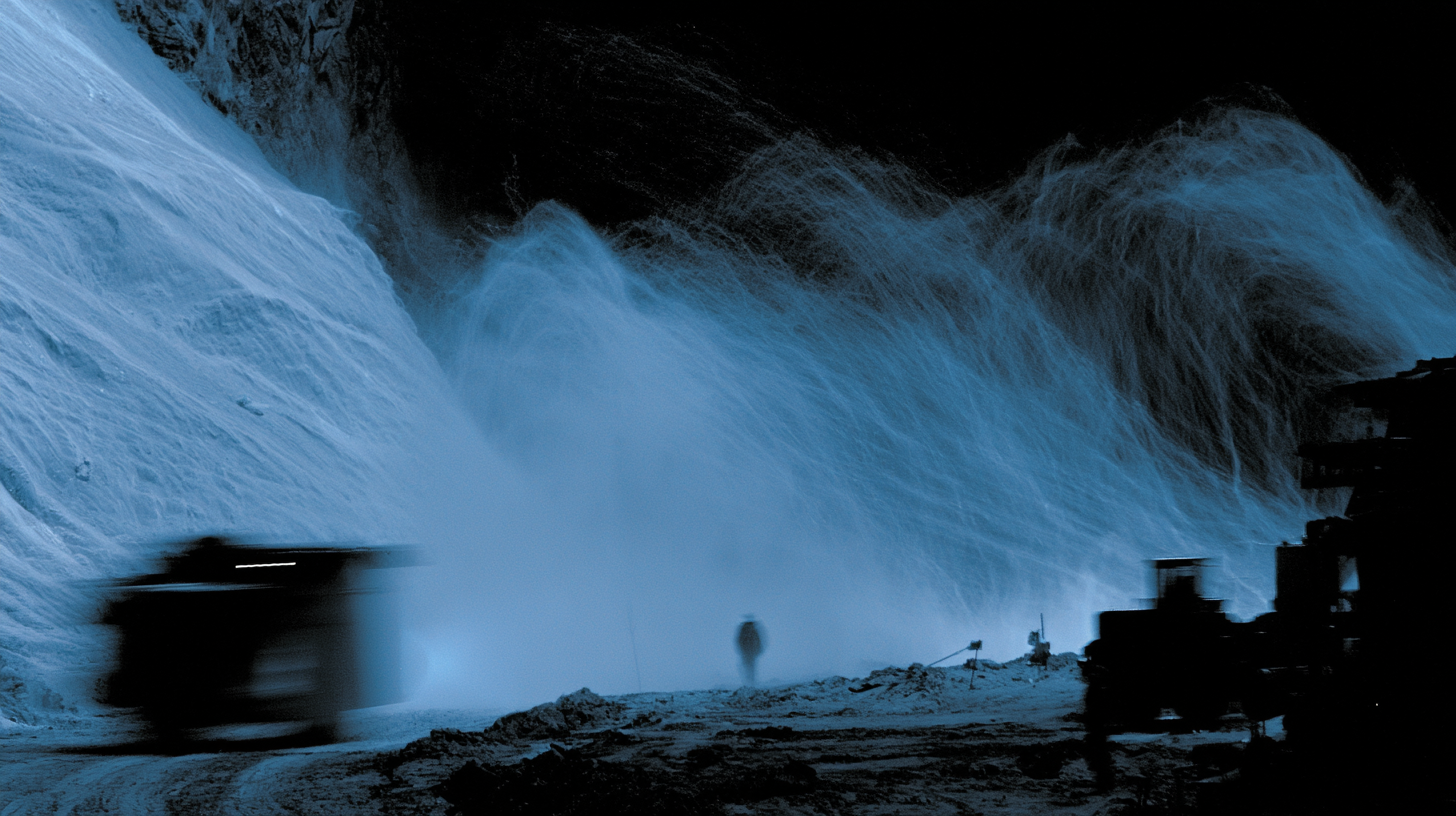
An autonomous quadruped enters the heading immediately after a blast and runs continuous gas readings through the entire ventilation cycle — recovering shift productivity and removing personnel from the hazardous window.
The same pass delivers more. Pre-processed, in-shift metrics — not raw data — layered onto the gas profile through our data abstraction stack.
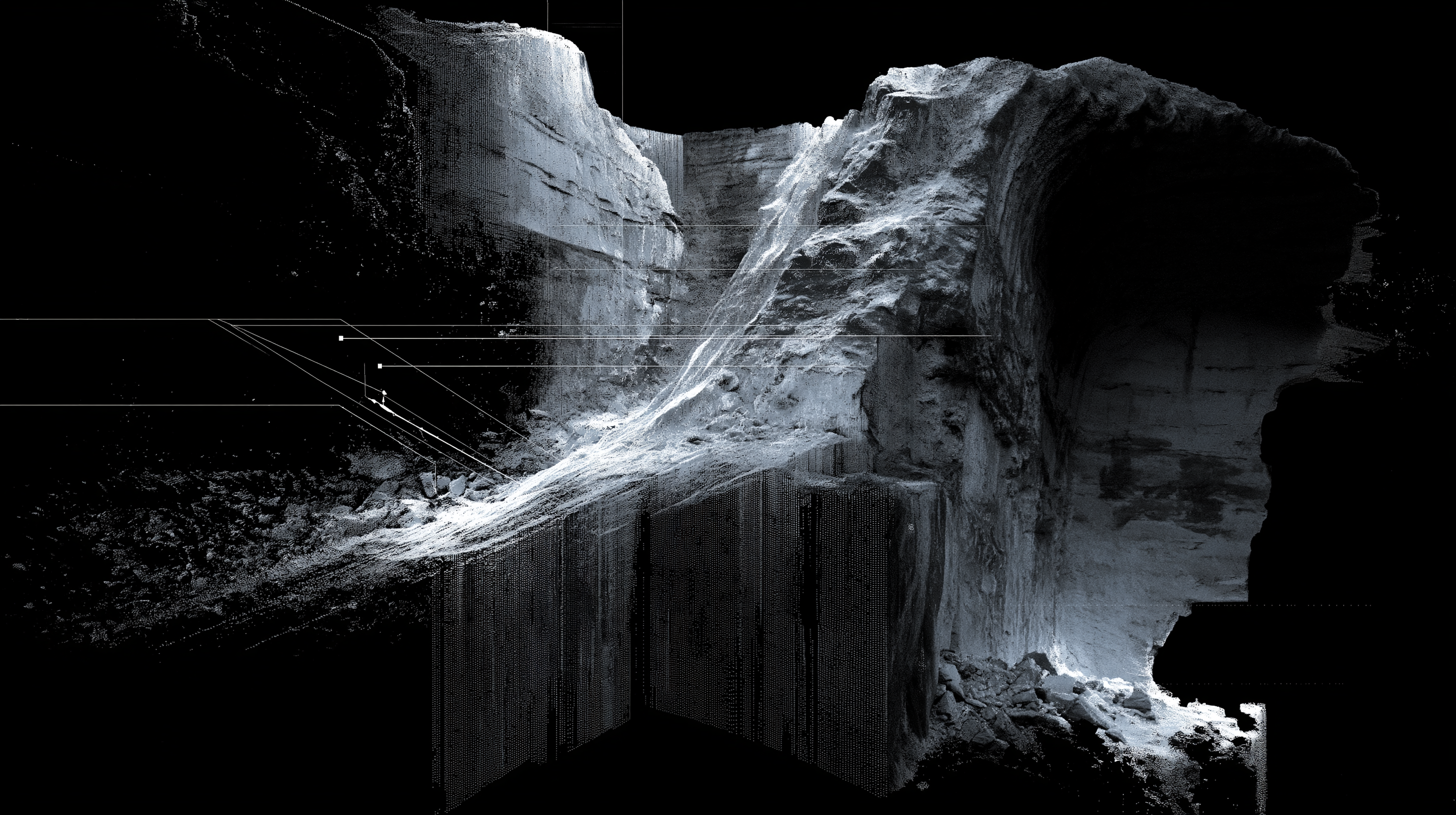
Multi-modal sensing resolves the heading down to the millimeter — geometry, lithology, and atmosphere fused into one model the operator can act on before anyone sets foot inside.

When a mine fails, the first hours decide outcomes — and the entry is exactly where no rescuer should be. Encouraged by mining-industry partners, we're extending Lunarian autonomy to send robots in first: to map the damage, locate personnel, and stream a live picture of the hazard back to the surface — turning a blind, deadly entry into an informed rescue.
Survey collapse, water ingress, and structural failure in minutes — before a rescue team commits to the entry.
Thermal and visual sensing search for trapped or unconscious workers through smoke, dust, and zero visibility.
Gas, heat, and geometry streamed continuously to incident command — so every decision is made on current ground truth.
Paired RGB, thermal-infrared, and gas sensing fused in real time into one coherent model of the environment — seeing through dust, dark, and zero visibility.
Onboard VLA / VLM models reason about the scene with no link to the surface — validated against models such as LLaVA in GPS-denied terrain.
Coordinated legged and aerial agents characterize the heading from floor to back, muck pile to roof — a full volumetric picture, not a single sweep.
One mission, many platforms. Quadrupeds and UAVs operate as a coordinated team, so the stack rides whatever hardware the environment — or the customer — demands.
We deployed a legged quadruped and UAV system in the Mojave Desert lava tubes — a leading terrestrial analog for lunar subsurface exploration. The campaign captured paired RGB and thermal-infrared data across complex, featureless terrain and established baseline performance for our onboard vision models operating fully GPS-denied.
 CEO · 01
CEO · 01
Go-to-market strategy, customer development, autonomous navigation, and vision models.
 CTO · 02
CTO · 02
Robot platform integration, custom sensor hardware, ROS systems, and path planning.
 ADVISOR · 03
ADVISOR · 03
Motion planning under uncertainty, multi-agent autonomy, space robotics, and GPS-denied navigation.
 ADVISOR · 04
ADVISOR · 04
Legged locomotion, robot-terrain interactions, bio-inspired mobility, and proprioceptive terrain sensing.
 ADVISOR · 05
ADVISOR · 05
Innovation, technical strategy, mine operations, and industry partnerships.

We work with mining operators, space agencies, and research partners deploying autonomy in the world's most demanding environments. Tell us about your terrain.